Design Requirements and Mission Constraints
The aircraft was designed under the following constraints:
- Maximum takeoff weight: 8 kg
- Cruise speed: 18 m/s
- Range: 50–60 km
- Cruise altitude: 400 m
- Electric propulsion system
- Short-field takeoff and landing capability
- Maximum camera field of view during cruise The mission profile required sustained straight-and-level flight over transmission corridors, with stable imaging and low stall speed to ensure safe maneuvering near infrastructure.
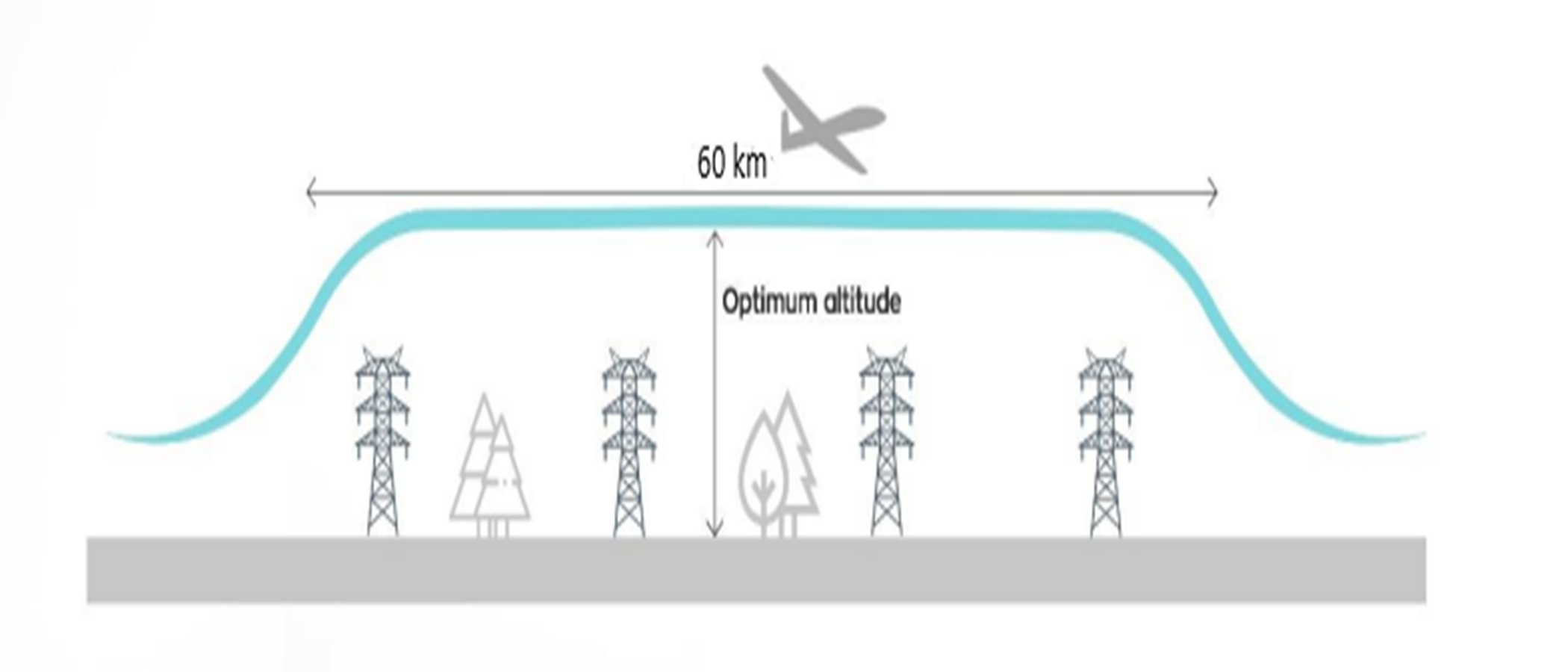
Fig: Mission Profile
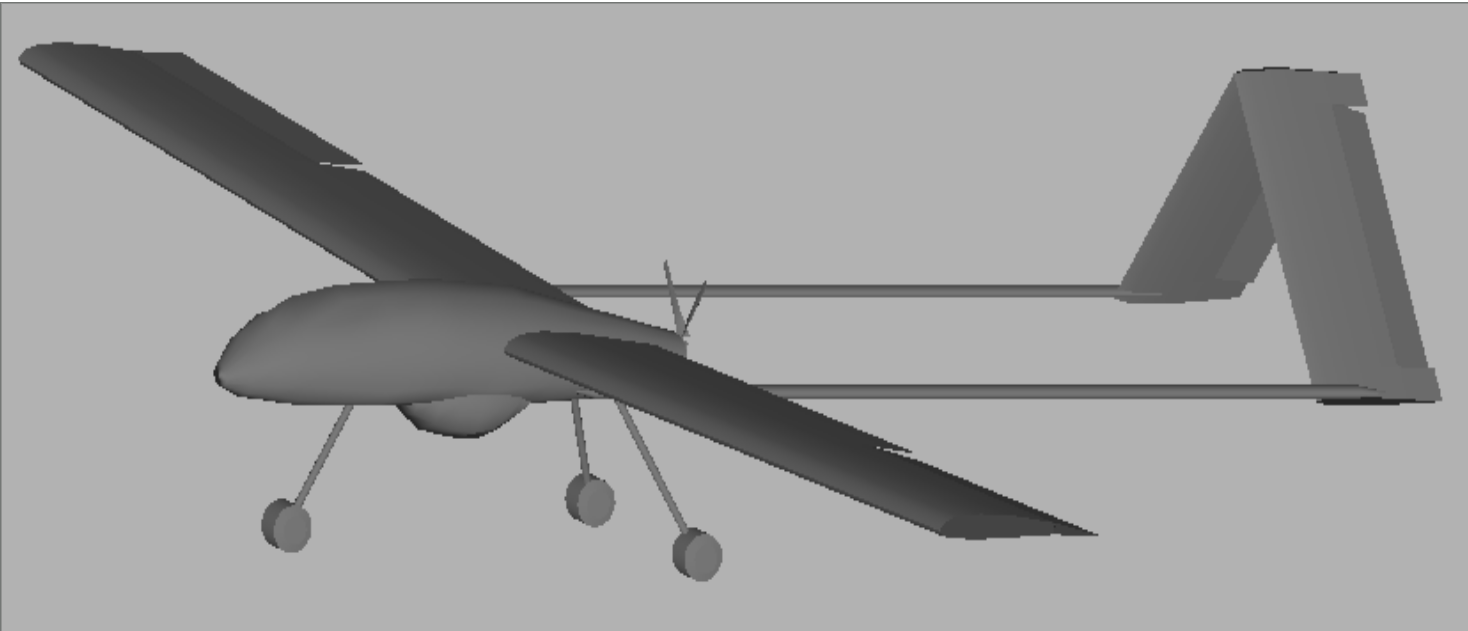
Aerodynamic Configuration and Geometry
The UAV features a high-wing configuration for enhanced lateral stability and ground clearance. The wing design includes:
- Wingspan: 2.8 m
- Aspect ratio: 10
- Root chord: 0.28 m
- Tip chord: 0.28 m
- Zero sweep angle
- MAC: 0.14 m The high aspect ratio improves lift-to-drag ratio, enhancing cruise efficiency and endurance. Zero sweep was selected to simplify construction and maintain predictable stall characteristics.
Longitudinal Stability and Neutral Point Determination
Static longitudinal stability was evaluated through trim curve analysis and neutral point estimation. The neutral point was determined both experimentally and via XFLR/X-Plane simulation methods. The trim versus lift coefficient curves allowed estimation of aerodynamic center location and stability margin.
The aircraft demonstrated positive static stability with acceptable static margin for safe autonomous flight operations.
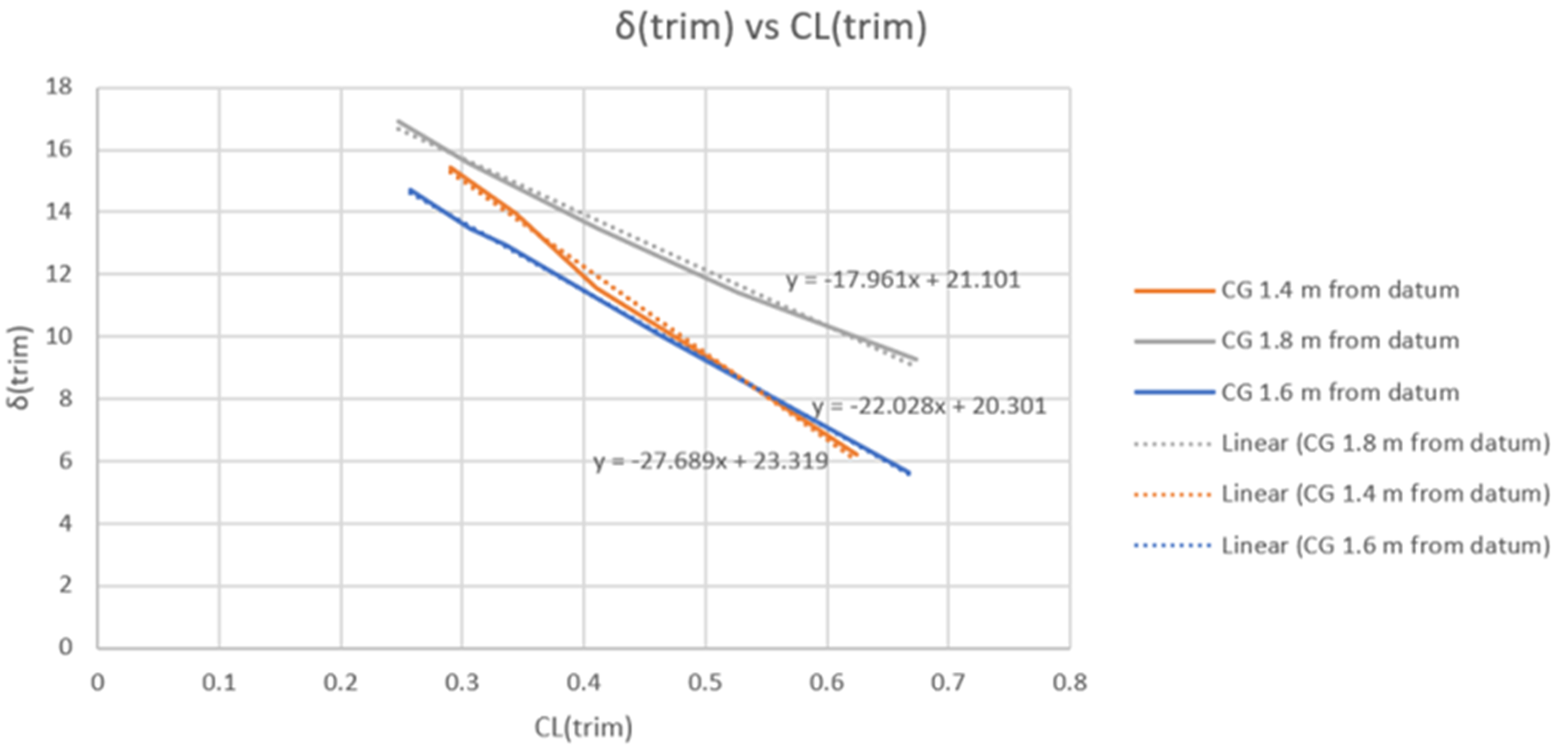
Fig: Trim VS CLmax (X-Plane simulated value)
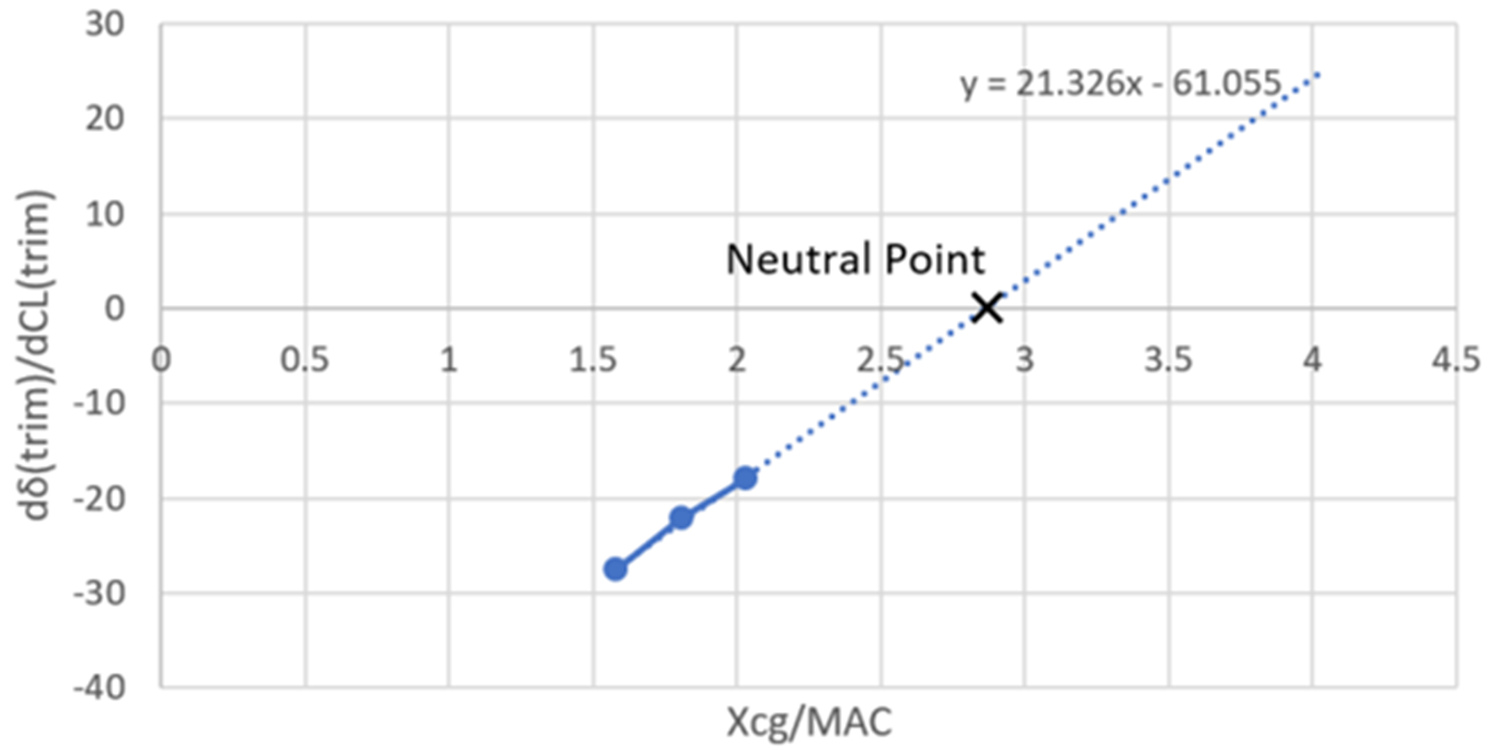
Fig: Neutral point calculation-experimental value
Performance Analysis
Performance metrics were evaluated under steady and climb/descent conditions.
Cruise Performance
- Cruise speed: 18 m/s
- Lift-to-drag optimized for endurance
Climb and Descent
Sawtooth climb and descent maneuvers were analyzed to evaluate rate of climb and sink rate behavior.
Stall Characteristics
Stall speed was estimated at approximately 3.23 m/s, ensuring safe low-speed operation during inspection passes.
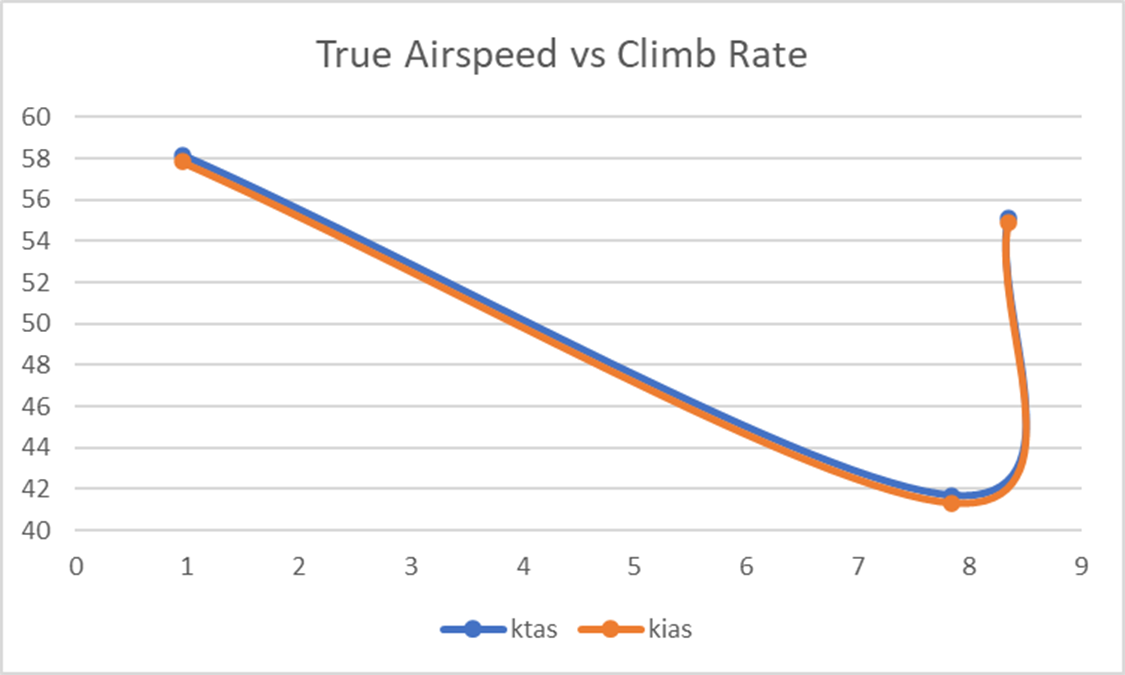
Fig: True Airspeed vs Climb Rate
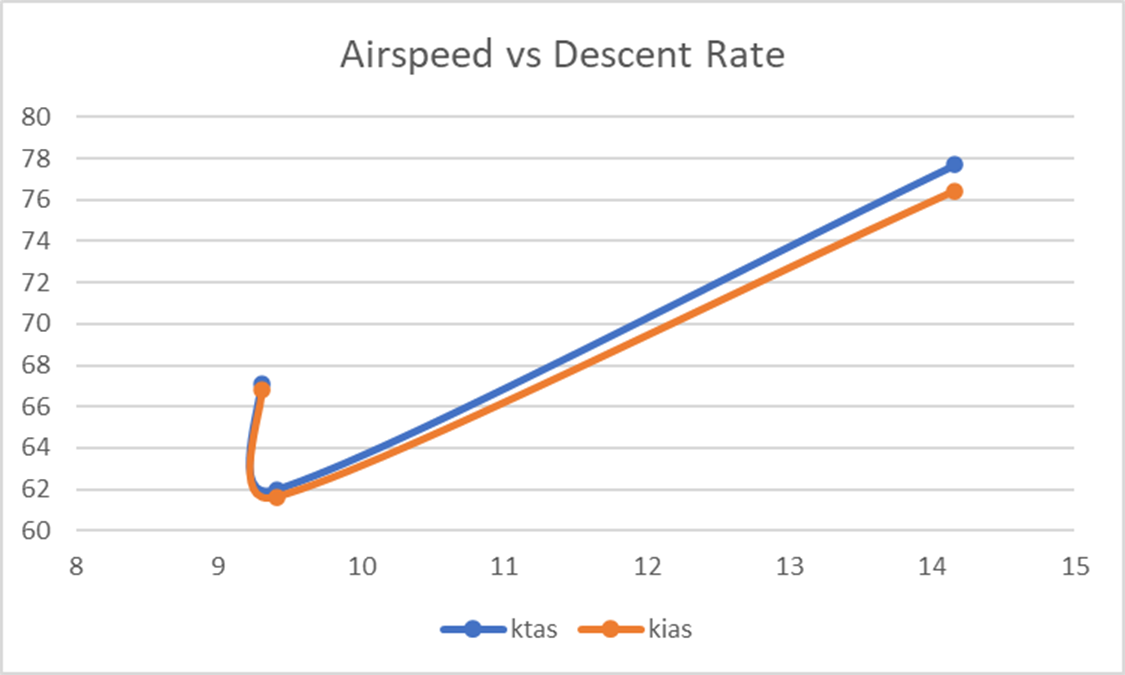
Fig: True Airspeed vs Descent Rate
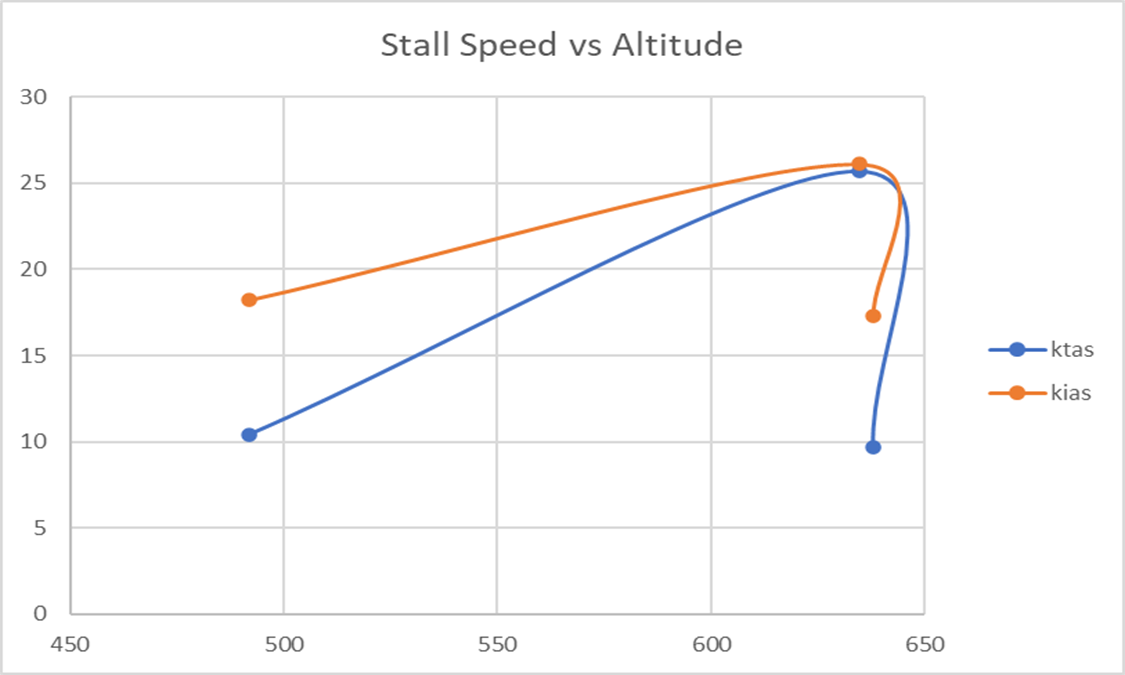
Fig: Stall Speed vs Altitude for both KTAS and KCAS
Dynamic Stability and Handling (Cooper-Harper Evaluation)
Handling qualities were assessed using Cooper-Harper criteria to evaluate pilot workload and controllability. The aircraft demonstrated acceptable handling qualities for semi-autonomous inspection operations.
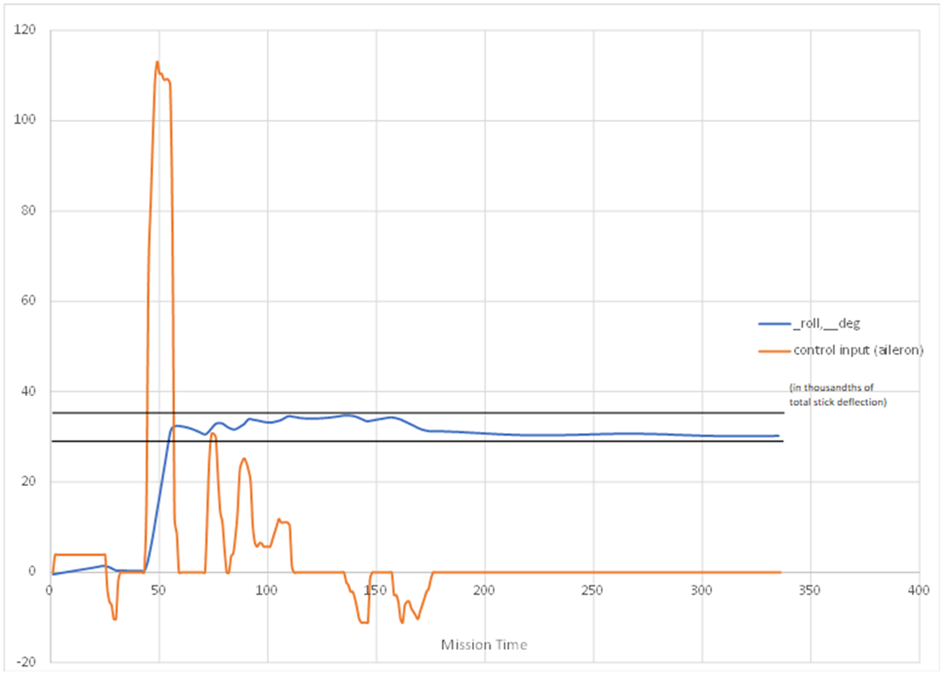
Fig: Handling quality assessment using Cooper-Harper rating scale.
Propulsion and Field Performance
The propulsion system included an electric motor rated at 100 HP equivalent power with a 0.4 m diameter propeller and 22-inch pitch. Takeoff distance was estimated at 21.9 m and landing distance at 43.4 m, enabling operation from short improvised runways.
Technical Significance
This project demonstrates:
- Conceptual aircraft design from mission requirements
- Aerodynamic performance modeling
- Stability analysis and neutral point estimation
- Flight envelope and stall characterization
- Handling quality evaluation
- Electric propulsion integration The final design provides a viable low-cost solution for power line inspection in rugged terrain.